
Pêkhate
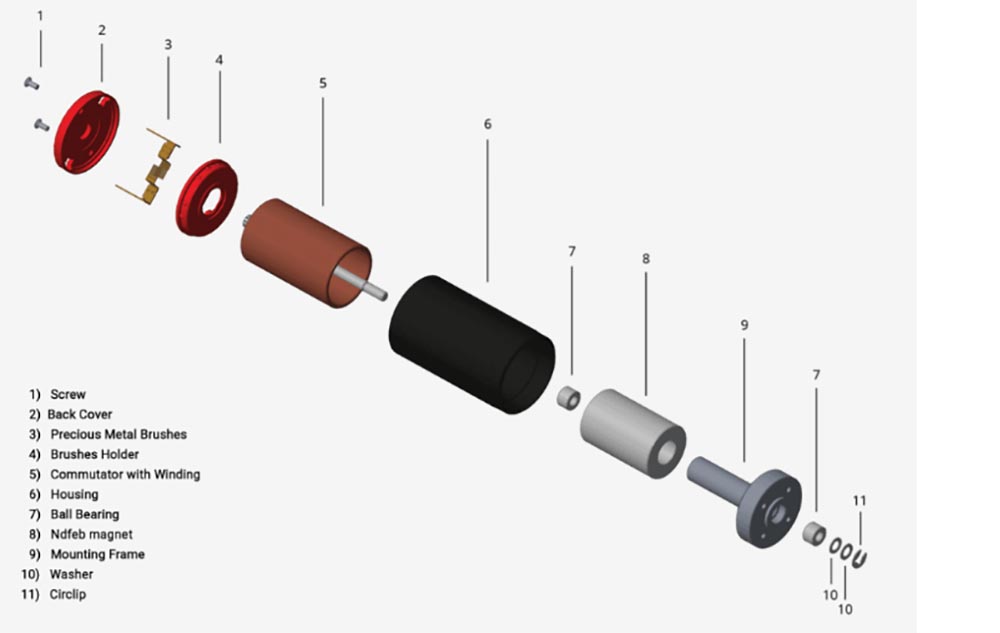
1. Motora DC ya bi mıknatîsê daîmî:
Ew ji stûnên stator, rotor, firçe, qalik û hwd pêk tê.
Stûnên statorê ji mıknatîsên daîmî (pola mıknatîsên daîmî), ji ferît, alnîko, neodîmyûm hesin boron û materyalên din têne çêkirin. Li gorî şêweya xwe ya avahiyê, ew dikare bibe çend celeb wekî celebê silindirî û celebê fayans.
Rotor bi gelemperî ji pelên pola silîkonê yên laminkirî tê çêkirin, û têla enamelkirî di navbera du qulên navika rotorê de tê pêçandin (di sê qulan de sê pêç hene), û girêdan bi rêzê ve li ser pelên metalî yên komutatorê têne qelandin.
Firçe beşek guhêzbar e ku dabînkirina hêzê û pêçandina rotorê bi hev ve girêdide, û xwediyê du taybetmendiyên guhêzbarî û berxwedana lixwekirinê ye. Firçeyên motorên bi mıknatîsên daîmî pelên metal ên yek-cinsî an jî firçeyên grafît ên metal, û firçeyên grafît ên elektroşîmyayî bikar tînin.
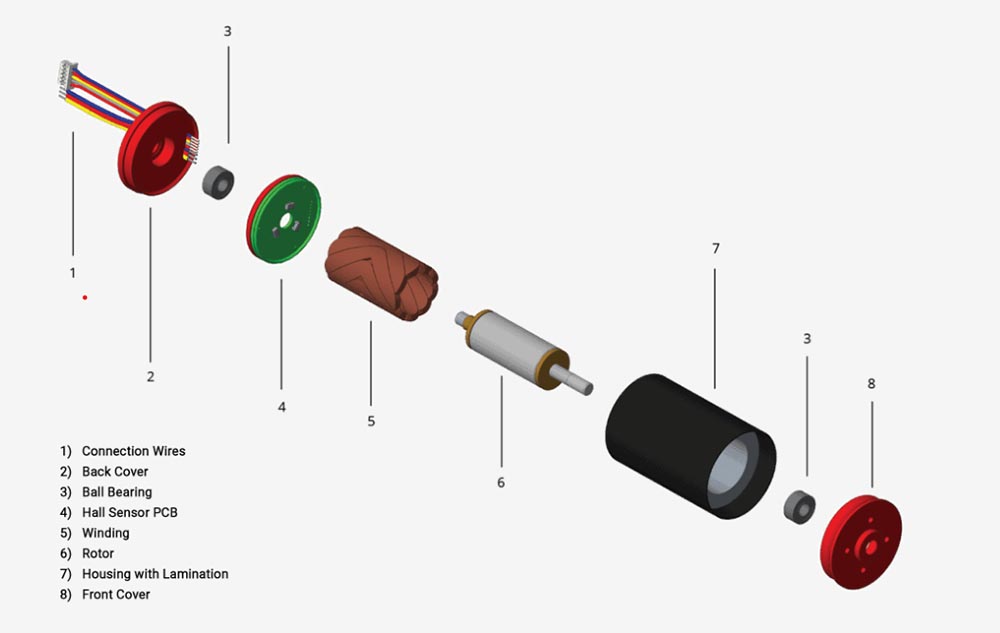
2. Motora DC ya bêfirçe:
Ew ji rotorek mıknatîsî ya daîmî, statorek pêçandina pir-qutbî, sensorek pozîsyonê û hwd pêk tê. Motora DC ya bêfirçe bi bêfirçebûnê tê taybetmend kirin û cîhazên guheztina nîvconductor (wek hêmanên Hall) bikar tîne da ku guheztina elektronîkî pêk bîne, ango cîhazên guheztina elektronîkî ji bo şûna guheztinên têkiliyê yên kevneşopî û firçeyan têne bikar anîn. Avantajên wê pêbaweriya bilind, bê şewqa guheztinê, û dengê mekanîkî yê kêm in.
Sensorê pozîsyonê li gorî guherîna pozîsyona rotorê, herika pêça statorê bi rêzek diyarkirî diguherîne (ango, pozîsyona qutba magnetîkî ya rotorê li gorî pêça statorê tespît dike, û di pozîsyona diyarkirî de sînyalek hesaskirina pozîsyonê çêdike, ku ji hêla devreya veguherîna sînyalê ve tê pêvajokirin û dûv re tê rakirin. Devreya guhêrbarê hêzê kontrol bike, û herika pêçê li gorî têkiliyek mantiqî ya diyarkirî biguherîne).

2. Motora DC ya bêfirçe:
Ew ji rotorek mıknatîsî ya daîmî, statorek pêçandina pir-qutbî, sensorek pozîsyonê û hwd pêk tê. Motora DC ya bêfirçe bi bêfirçebûnê tê taybetmend kirin û cîhazên guheztina nîvconductor (wek hêmanên Hall) bikar tîne da ku guheztina elektronîkî pêk bîne, ango cîhazên guheztina elektronîkî ji bo şûna guheztinên têkiliyê yên kevneşopî û firçeyan têne bikar anîn. Avantajên wê pêbaweriya bilind, bê şewqa guheztinê, û dengê mekanîkî yê kêm in.
Sensorê pozîsyonê li gorî guherîna pozîsyona rotorê, herika pêça statorê bi rêzek diyarkirî diguherîne (ango, pozîsyona qutba magnetîkî ya rotorê li gorî pêça statorê tespît dike, û di pozîsyona diyarkirî de sînyalek hesaskirina pozîsyonê çêdike, ku ji hêla devreya veguherîna sînyalê ve tê pêvajokirin û dûv re tê rakirin. Devreya guhêrbarê hêzê kontrol bike, û herika pêçê li gorî têkiliyek mantiqî ya diyarkirî biguherîne).
3. Motora bêfirçe ya bi mıknatîsê daîmî yê leza bilind:
Ew ji navika statorê, rotora pola ya magnetîkî, gerîdeya rojê, kelûpela hêdîbûnê, qalikê hubê û hwd pêk tê. Sensorek Hall dikare li ser qapaxa motorê ji bo pîvandina leza were siwarkirin.
Berawirdkirina motorên firçekirî û motorên bêfirçe
Cudahiya di prensîba elektrîkkirinê de di navbera motorek firçekirî û motorek bê firçe de: Motorek firçekirî bi firçeyek karbonê û komutatorek bi awayekî mekanîkî tê komutasyonkirin. Motorek bê firçe ji hêla kontrolkerek ve li ser bingeha sînyala enduksiyonê bi elektronîkî tê komutasyonkirin.
Prensîba dabînkirina hêzê ya motorên firçekirî û motorên bêfirçe ji hev cuda ne, û avahiya wan a navxweyî jî ji hev cuda ye. Ji bo motorên hub, moda derketinê ya torka motorê (gelo ji hêla mekanîzmaya kêmkirina gerokê ve were hêdîkirin) û avahiya wan a mekanîkî jî ji hev cuda ye.
motora dc ya firçekirî ya bênavik
motora dc ya bê firçe û bê navik
Dema Postê: Hezîran-03-2019